Example vis 2a#
[1]:
from math import ceil
import pystare as ps
import matplotlib as mpl
import matplotlib.pyplot as plt
import matplotlib.tri as tri
import cartopy.crs as ccrs
import numpy as np
[2]:
def shiftarg_lon(lon):
"If lon is outside +/-180, then correct back."
if(lon>180):
return ((lon + 180.0) % 360.0)-180.0
else:
return lon
def triangulate1(lats,lons):
"Prepare data for tri.Triangulate."
print('triangulating1...')
intmat=[]
npts=int(len(lats)/3)
k=0
for i in range(npts):
intmat.append([k,k+1,k+2])
k=k+3
for i in range(len(lons)):
lons[i] = shiftarg_lon(lons[i])
print('triangulating1 done.')
return lons,lats,intmat
def plot1(lon,lat,lons,lats,triang,c0='r',c1='b',transf=None,lw=1):
# if(lon is not None):
if True:
x=np.zeros([lon.size+1],dtype=np.double);x[:-1]=lon[:];x[-1]=lon[0]
y=np.zeros([lat.size+1],dtype=np.double); y[:-1]=lat[:]; y[-1]=lat[0]
ax.plot(x,y,True,transform=transf,c=c0)
plt.triplot(triang,c1+'-',transform=transf,lw=lw,markersize=3)
# plt.scatter(lons,lats,s=10,c=c1,transform=ccrs.PlateCarree())
return
def make_hull(lat0,lon0,resolution0):
hull0 = ps.to_hull_range_from_latlon(lat0,lon0,resolution0)
print('hull0 len: ',len(hull0),type(hull0))
lath0,lonh0,lathc0,lonhc0 = ps.to_vertices_latlon(hull0)
lons0,lats0,intmat0 = ps.triangulate(lath0,lonh0)
print('lons0 len: ',len(lons0))
print('intmat len: ',len(intmat0),type(intmat0))
triang0 = tri.Triangulation(lons0,lats0,intmat0)
for i in range(len(intmat0)):
print(i,intmat0[i],lons0[intmat0[i]],lats0[intmat0[i]])
print('triang ',triang0.triangles.shape)
# exit()
return lats0,lons0,triang0,hull0
[3]:
# resolution = 5
# resolution = 4
resolution = 3
resolution0 = resolution;
# lat0 = np.array([ 10, 5, 60,70], dtype=np.double)
# lon0 = np.array([-30,-20,60,10], dtype=np.double)
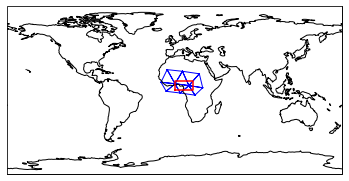
lat0 = np.array([0, 0,10,10], dtype=np.double)
lon0 = np.array([0,20,20,0], dtype=np.double)
lats0,lons0,triang0,hull0 = make_hull(lat0,lon0,resolution0)
print('hull0: ',len(hull0))
# Set up the projection and transformation
proj = ccrs.PlateCarree()
# proj = ccrs.Robinson() # Drives spurious IllegalArgumentException: Argument must be Polygonal or LinearRing
# proj = ccrs.Mollweide() # Drives spurious IllegalArgumentException: Argument must be Polygonal or LinearRing
# transf = ccrs.Geodetic()
transf = ccrs.PlateCarree()
plt.figure()
plt.subplot(projection=proj,transform=transf)
ax = plt.axes(projection=proj,transform=transf)
ax.set_global()
ax.coastlines()
print('graphics-0')
plot1(lon0,lat0,lons0,lats0,triang0,c0='r',c1='b',transf=transf)
plt.show()
hull0 len: 10 <class 'numpy.ndarray'>
lons0 len: 30
intmat len: 10 <class 'list'>
0 [0, 1, 2] [15.35858327 21.90167434 30.20648377] [ 4.85020585 -5.46142928 2.5084551 ]
1 [3, 4, 5] [-14.63880654 -8.97828322 0.415556 ] [ 8.42105871 -1.3114612 6.86746932]
2 [6, 7, 8] [15.35858327 0.415556 6.11345602] [ 4.85020585 6.86746932 -3.1316658 ]
3 [9, 10, 11] [ 6.11345602 0.415556 -8.97828322] [-3.1316658 6.86746932 -1.3114612 ]
4 [12, 13, 14] [15.35858327 6.11345602 21.90167434] [ 4.85020585 -3.1316658 -5.46142928]
5 [15, 16, 17] [-14.63880654 0.415556 -8.02332385] [ 8.42105871 6.86746932 22.0035996 ]
6 [18, 19, 20] [15.35858327 8.4459729 0.415556 ] [ 4.85020585 20.22249681 6.86746932]
7 [21, 22, 23] [ 8.4459729 -8.02332385 0.415556 ] [20.22249681 22.0035996 6.86746932]
8 [24, 25, 26] [15.35858327 30.20648377 26.56505138] [ 4.85020585 2.5084551 17.54840083]
9 [27, 28, 29] [15.35858327 26.56505138 8.4459729 ] [ 4.85020585 17.54840083 20.22249681]
triang (10, 3)
hull0: 10
graphics-0
[ ]:
[ ]: